Percobaan III
Timer Arduino
1. Prosedur [Kembali]
- Rangkailah seperti rangkaian berikut
- Buka Arduino IDE dan masukan listing program
- Upload program ke arduino
- Variasikan tombol yang ditekan dan amati keluarannya pada LCD

Gambar 1. Rangkaian Hardware


.jpeg)

5. Breadboard.jpg)



Prinsip Kerja :
1. Arduino Uno

2. DIP Switch

3. LCD
.jpeg)
4. Kabel jumper

.jpg)
6. Resistor

7. Seven Segment

Diagram Blok:



Pada percobaan 3 modul 2 menggunakan komponen berupa arduino uno sebagai pusat pengendali dimana pin dari input dan output dihubungkan ke pin arduino. Dipswith adalah input Arduino yang dihubungkan ke kaki A0-A3 Arduino. Outputnya, 7-segment 2-digit, dihubungkan ke pin 4-13 Arduino dimana melalui komponen kabel jumper untuk menghubungkannya.
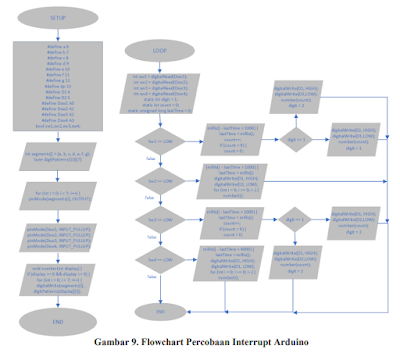
Jika tombol pertama (sw1) ditekan, akan menambahkan angka pada layar digit yang aktif setiap detiknya, mengubah digit antara D1 dan D2. Jika tombol kedua (sw2) ditekan, akan menampilkan urutan angka dari 9 hingga 0 pada layar digit yang aktif, mengubah digit antara D1 dan D2. Jika tombol ketiga (sw3) ditekan, akan menambahkan angka pada layar digit yang aktif bergantian antara D1 dan D2 dengan waktu 2 detik dan yang terakhir, Dengan menekan tombol keempat (sw4), program akan menampilkan urutan angka dari 9 hingga 0 pada layar digit yang aktif dengan waktu debouncing dua detik.
4. Flowchart dan Listing Program [Kembali]
Flowchart:

Listing Program:
#define a 6
#define b 7
#define c 8
#define d 9
#define e 10
#define f 11
#define g 12
#define dp 13
#define D1 4
#define D2 5
#define Dsw1 A0
#define Dsw2 A1
#define Dsw3 A2
#define Dsw4 A3
bool sw1,sw2,sw3,sw4;
int segments[] = {a,b,c,d,e,f,g};
byte digitPatterns[10][7] = {
{0, 0, 0, 0, 0, 0, 1}, // 0
{1, 0, 0, 1, 1, 1, 1}, // 1
{0, 0, 1, 0, 0, 1, 0}, // 2
{0, 0, 0, 0, 1, 1, 0}, // 3
{1, 0, 0, 1, 1, 0, 0}, // 4
{0, 1, 0, 0, 1, 0, 0}, // 5
{0, 1, 0, 0, 0, 0, 0}, // 6
{0, 0, 0, 1, 1, 1, 1}, // 7
{0, 0, 0, 0, 0, 0, 0}, // 8
{0, 0, 0, 0, 1, 0, 0} // 9
};
void setup() {
for (int i = 0; i < 7; i++) {
pinMode(segments[i], OUTPUT);
}
pinMode(dp, OUTPUT);
pinMode(D1, OUTPUT);
pinMode(D2, OUTPUT);
pinMode(Dsw1, INPUT_PULLUP);
pinMode(Dsw2, INPUT_PULLUP);
pinMode(Dsw3, INPUT_PULLUP);
pinMode(Dsw4, INPUT_PULLUP);
Serial.begin(9600);
}
void number(int display) {
if (display >= 0 && display <= 9) {
for (int i = 0; i < 7; i++) {
digitalWrite(segments[i], digitPatterns[display][i]);
}
}
}
void loop() {
int sw1 = digitalRead(Dsw1);
int sw2 = digitalRead(Dsw2);
int sw3 = digitalRead(Dsw3);
int sw4 = digitalRead(Dsw4);
static int digit = 1; // Digit yang sedang ditampilkan (1 atau 2)
static int count = 0; // Counter untuk digit
static unsigned long lastTime = 0; // Waktu terakhir pembacaan tombol
if (sw1 == LOW) {
if (millis() - lastTime > 1000) { // Debouncing
lastTime = millis();
count++;
if (count > 9) {
count = 0;
}
if (digit == 1) {
digitalWrite(D1, HIGH);
digitalWrite(D2, LOW);
number(count);
digit = 2;
} else {
digitalWrite(D1, LOW);
digitalWrite(D2, HIGH);
number(count);
digit = 1;
}
}
}
else if (sw2 == LOW) {
if (millis() - lastTime > 1000) { // Debouncing
lastTime = millis();
digitalWrite(D1, HIGH);
digitalWrite(D2, LOW);
for (int i = 9; i >= 0; i--) {
number(i);
delay(1000); // Delay agar Anda bisa melihat perubahan digit
}
}
}
if (sw3 == LOW) {
if (millis() - lastTime > 2000) { // Debouncing
lastTime = millis();
count++;
if (count > 9) {
count = 0;
}
if (digit == 1) {
digitalWrite(D2, HIGH);
digitalWrite(D1, LOW);
number(count);
digit = 2;
} else {
digitalWrite(D2, LOW);
digitalWrite(D1, HIGH);
number(count);
digit = 1;
}
}
}
else if (sw4 == LOW) {
if (millis() - lastTime > 2000) { // Debouncing
lastTime = millis();
digitalWrite(D2, HIGH);
digitalWrite(D1, LOW);
for (int i = 9; i >= 0; i--) {
number(i);
delay(200); // Delay agar Anda bisa melihat perubahan digit
}
}
}
}
Ketika mengaktifkan salah satu Dip Switch untuk dibaca oleh arduino uno dan arduino akan memberikan perintah untuk menampilkan angka pada seven segment begitu pula jika mengaktifkan dua switch sekaligus (yang terdapat millis) sesuai dengan kondisi pada program.
᭒ HTML↠ klik disini
᭒ Gambar Rangkaian ↠ klik disini
᭒ Video Demo ↠ klik disini
᭒ Listing Program ↠ klik disini
᭒ Video Demo ↠ klik disini
᭒ Listing Program ↠ klik disini
᭒ Datasheet Arduino↠ klik disini
᭒ Datasheet 7-Segment↠ klik disini
᭒ Datasheet LCD↠ klik disini
᭒ Datasheet DIP Switch↠ klik disini













